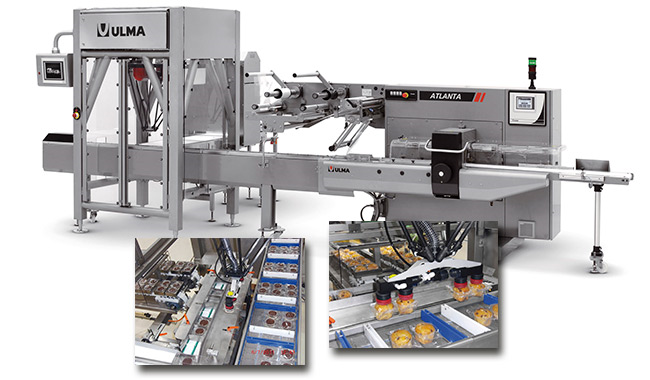
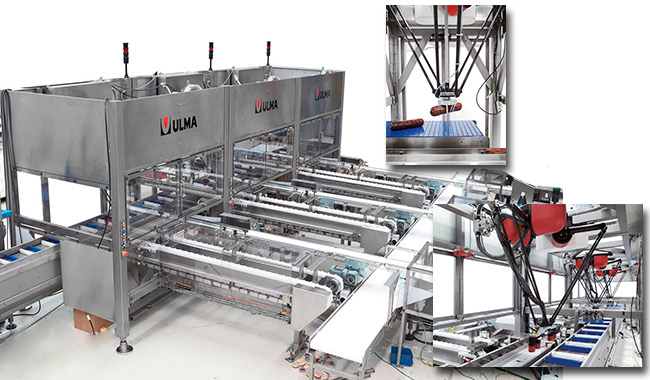
Automatisches beladen der Schlauchbeutelverpackungsmaschinen
Kompakte Roboterzellen für Beladevorgänge, speziell entwickelt für die Integration in horizontale Schlauchbeutelmaschinen. Die Greifvorrichtungen dieses Roboters werden für jede Anwendung speziell entwickelt. Die Geschwindigkeit jeder Roboterzelle variiert sowohl aufgrund der unterschiedlichen Produktabmessungen, Produkteigenschaften und des Produktflusses, als auch von den speziellen Anforderungen die an ein jeden System gestellt werden. Die Anforderungen an den Roboter können an die Zellen angepasst werden. Jede Zelle hat ihre eigene Steuerung, diese kann in die Steuerung der Schlauchbeutelmaschine integriert werden. Auch ist es möglich, alle anderen Teile der Linie, abhängig von deren Funktionalität, in die Steuerung zu integrieren.

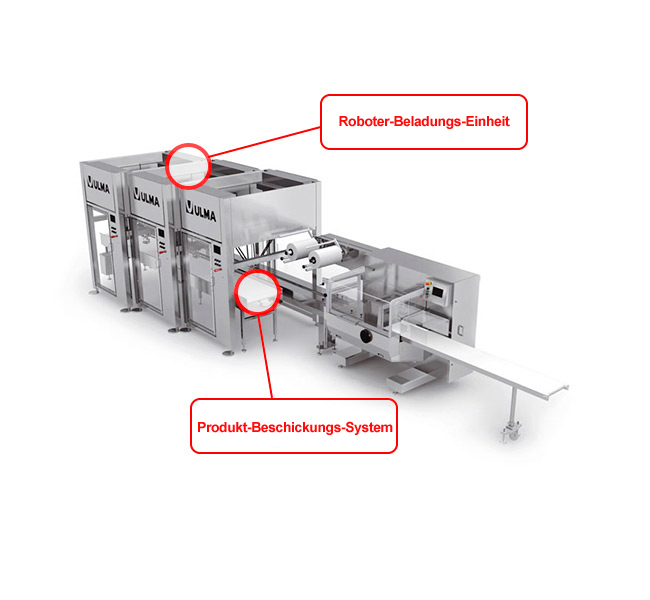
Roboter-Beladungs-Einheit
Eine Weiterentwicklung auf Grundlage der ULMA D12H Roboter mit Visualisierungs- System zum detektieren von chaotisch zugeführten Produkten, die durch das Transport System gefördert werden. Das Auswählen und Platzieren der Waren erfolgt dynamisch im „Tracking“-System (in Bewegung). Transportförderband bis zum Zufuhrband der Verpackungsmaschine.
Produkt-Beschickungs-System
Produkt-Transport–System für chaotisch zugeführte Produkte. Die Geschwindigkeit wird von den Roboterzellen gesteuert.
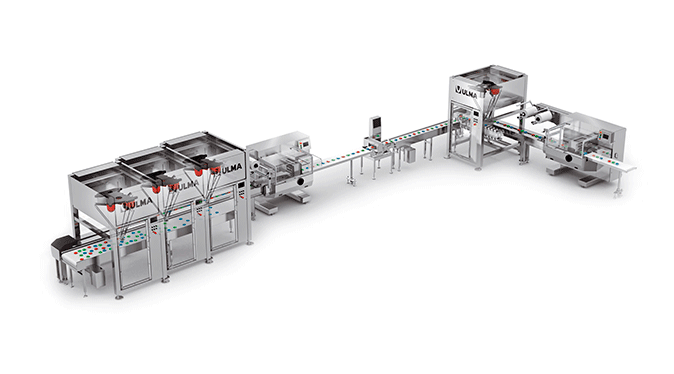
MEHRFACHPACKER
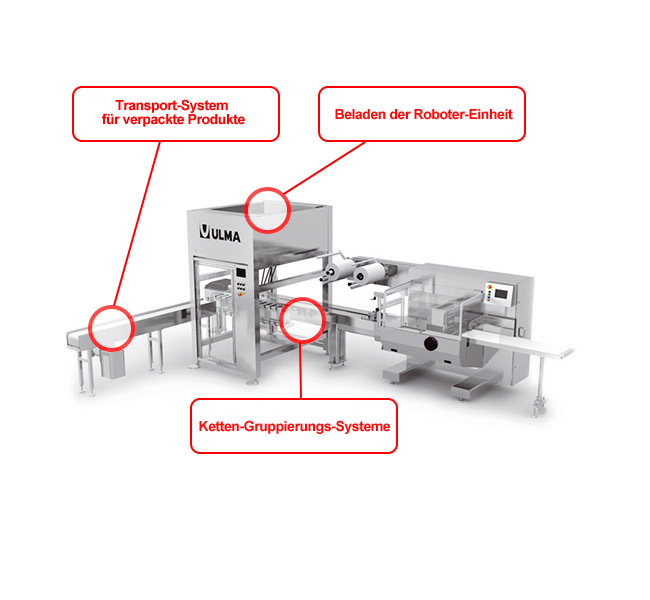
Transport-System für verpackte Produkte
Die Artikel können einzeln, hintereinander oder auch durcheinander transportiert werden. Die Artikel können in verschiedenen Formaten angeordnet werden, bevor sie weiterverarbeitet werden.
Beladen der Roboter-Einheit
Diese Einheit beinhaltet einen oder mehrere ULMA D12H Roboter mit einem Produkterkennungssystem, um die Artikel entweder in Kartons oder anderweitig weiter zu verpacken. Das Aufnehmen und Ablegen der Artikel kann einzeln oder in Gruppen erfolgen.
Ketten-Gruppierungs-Systeme
Ein oder zwei voneinander unabhängige angetriebene Ketten erstellen kontinuierlich Produktgruppen, und ermöglichen es dem Roboter auf diese Weise, Produktgruppen zu greifen. Die Artikel können so transportiert, ausgerichtet und geordnet werden, um Gruppen in Laufrichtung oder 90 ° zur Laufrichtung zu bilden.
Dieser Prozess kann in Hochgeschwindigkeit ausgeführt werden, um große Produktionsmengen zu erreichen.